Tutorials: Robotics¶
Collected by Jianan. 本章节会收录关于机器人学的材料,和 Frontier 的区别在于本章节将侧重和个人的学习研究有关的材料。部分文字从原文直接引用,如有侵权,立即删除。本文仅供个人参考学习,不作商业用途。
课程资源¶
- CS 287: Advanced Robotics, Fall 2019
- Pieter Abbeel开的这门高级机器人课程, 涉及的内容很多, 包括传统的经典优化与控制理论, 比较新的强化学习在机器人上的应用等, 还邀请了一些学术界/工业界相关领域的大牛去做讲座
- Simulink 基于模型的设计视频教程 公众号
- 无人机飞控学习,基于模型的设计(MBD、快速控制原型)学习人员(matlab/simulink学习)、嵌入式开发人员
- 网易云课堂
- QT无人机地面站设计与制作教程
- QT地面站设计开发,QT界面设计,无人机飞控学习人员
-
- 北航全权老师公开课
项目资源¶
-
GAAS(Generalized Autonomy Aviation System)
-
包含了 SLAM、避障路径规划、飞行控制模块、计算机视觉等人工智能技术。可为无人机实现三维空间感知、三维空间避障、自主重构飞行航线、复杂任务规划、视觉里程计(VIO)、实时建模与目标跟踪等功能。无人机开发者与硬件公司可以直接通过调用相关部分来获取自己需要的功能,而无需付出高昂的开发成本。GAAS 基于对商业公司友好的 BSD-3 协议开源,与 PX4 和 Mavros 采用了相同的协议。
-
- References on Optimal Control, Reinforcement Learning and Motion Planning, by Edouard Leurent
小文章¶
-
- 磁钉磁条电磁,光学激光,测距,轮廓,二维码,惯导,slam ...
- 一种新的四旋翼模拟器:Flightmare
- 2020年最酷的十个无人机项目上 | 下
- Python从新手到大师
- https://github.com/jackfrued/Python-100-Days
- 如何用Matlab进行多无人机编队仿真 Github
- 无人系统(无人机)基于模型(Simulink/Matlab)的设计方法介绍
Model-based Design (MBD)¶
- 全权
- 新飞哥,阿木实验室
- simulink PX4 embedded coder 官方手册
- 据说更易于维护
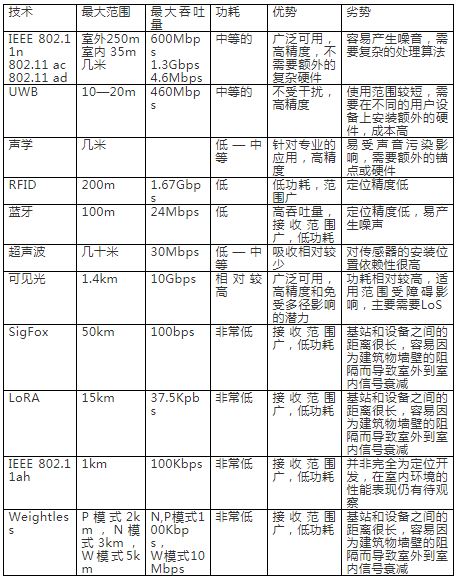
室内定位技术的比较¶